Am Morgen des 17. Dezember 1837 näherte sich Kapitän Sumner, er war schon 22 Tage von South Carolina kommend auf See, dem St. George Kanal zwischen Irland und Wales. Seine Reise ging nach Greenock in Schottland. Es stürmte und der Himmel war bedeckt. Er brauchte jetzt dringend Sicherheit darüber, dass ihn der Wind aus SSE nicht zu weit an die gefährlich flache und steinige Südostküste von Irland versetzt hatte. Etwa um 10:15 riss die Wolkendecke plötzlich auf und die Sonne wurde sichtbar. Dies reichte gerade für eine Messung des Kimmabstandes der Sonne.
Dieses Ereignis war die Geburtsstunde der grafischen Navigation, die Sumner allerdings erst sechs Jahre später in einem Buch veröffentlichte und die Navigation in der Seefahrt grundlegend revolutioniert hat.

Die Berechnungen beim Sumner Verfahren sind identisch mit denen zur Bestimmung der Chronometerlänge. Es gab also schon reichlich Erfahrungen damit. Zur Berechnung einer Sumnerlinie muss die Höhe der Sonne über dem Horizont gemessen werden. Danach müssen zwei ganzgradige Breitenkreise festgelegt werden, wobei die eine Breite südlich und die andere nördlich von der vermuteten Standortbreite liegen muss. Für diese zwei Breiten  und
und  werden dann die Längen
werden dann die Längen  und
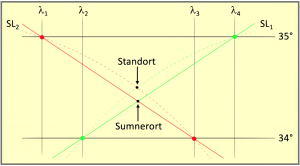
und  für dieselbe Beobachtung berechnet. Die Schnittpunkte der Längen mit den geschätzten Breiten sind somit Punkte genau auf der Kreislinie des Höhenkreises, der auch als Kreis gleicher Höhen oder einfach Höhengleiche bekannt ist. Werden diese beiden Punkte mit einer Geraden verbunden, so erhält man eine Sehne und nach deren Verlängerung zu beiden Seiten eine Sekante. Diese Sekante ist die Standlinie, auf der das Schiff irgendwo stehen sollte. Eine grafische Standortbestimmung ist also ohne zusätzliche Berechnungen nicht möglich. Die Formeln in diesem Fall lauten für den ersten Schnittpunkt: (mathematische Grundlagen HIER)
für dieselbe Beobachtung berechnet. Die Schnittpunkte der Längen mit den geschätzten Breiten sind somit Punkte genau auf der Kreislinie des Höhenkreises, der auch als Kreis gleicher Höhen oder einfach Höhengleiche bekannt ist. Werden diese beiden Punkte mit einer Geraden verbunden, so erhält man eine Sehne und nach deren Verlängerung zu beiden Seiten eine Sekante. Diese Sekante ist die Standlinie, auf der das Schiff irgendwo stehen sollte. Eine grafische Standortbestimmung ist also ohne zusätzliche Berechnungen nicht möglich. Die Formeln in diesem Fall lauten für den ersten Schnittpunkt: (mathematische Grundlagen HIER)
(1) 
(2) 
Für den zweiten Schnittpunkt (; ) muss man genauso rechnen:
(3) 
(4) 
Bei Beobachtungen vor dem Schiffsmittag, also vor der Kulmination der Sonne werden Grt und  addiert. Nach der Kulmination der Sonne muss von Grt abgezogen werden.
addiert. Nach der Kulmination der Sonne muss von Grt abgezogen werden.
Eine zweite Standlinie, nach einer zweiten Beobachtung der Sonne einige Stunden später, wird dann genauso berechnet, also wieder durch Angabe zweier Schätzbreiten  und
und  , für die auch wieder die Längen
, für die auch wieder die Längen  und
und  mit dem Greenwichwinkel Grt‘ berechnet werden müssen. Die Stundenwinkel
mit dem Greenwichwinkel Grt‘ berechnet werden müssen. Die Stundenwinkel  und
und  werden mit der Höhe h‘ und der Deklination
werden mit der Höhe h‘ und der Deklination  bestimmt. Diese zweite Standlinie kreuzt sich mit der ersten Standlinie. Der Kreuzungspunkt, der sich aus den auf Papier gezeichneten Standlinien herauslesen lässt, ist der Schiffsort.
bestimmt. Diese zweite Standlinie kreuzt sich mit der ersten Standlinie. Der Kreuzungspunkt, der sich aus den auf Papier gezeichneten Standlinien herauslesen lässt, ist der Schiffsort.
Diskussion
Der ganze Rechenaufwand, der nur mit Hilfe von Logarithmentafeln erledigt werden konnte, war mit insgesamt vier zu lösenden Formeln nicht gerade gering und hat schon pro Standlinie bis zu einer halben Stunde dauern können. Damals war der Ortsstundenwinkel von Greenwich, der Grt, noch gar nicht in Gebrauch. So musste bei der Längenberechnung noch mit der Zeitgleichung gearbeitet werden, was alles noch ein wenig verkomplizierte.
Weil die Schätzbreiten 60 Seemeilen auseinanderliegen, erhebt sich über der Sehne ein Kreisbogen, der umso höher ist, desto größer der gemessene Kimmabstand ist. Mit großer Wahrscheinlichkeit wird der wahre Standort ein Punkt auf diesem Kreisbogen sein. Weil der Breitenabstand von 1° beibehalten bleibt, wird die Höhe des Kreisabschnittes und somit die Fehlerwahrscheinlichkeit bei Gestirnshöhen über etwa 70° ansteigen. Man musste jedoch diesen großen Breitenabstand wählen, weil es sonst unmöglich geworden wäre, die Standlinie im richtigen Winkel einzuzeichnen.
Schließlich war der Bildpunkt der Sonne weit weg und man hatte lediglich zwei Punkte in der Karte, die mit Bleistift und Lineal zu verbinden sind. Diese durften nicht zu eng beieinander liegen. Wurde ein falscher Winkel getroffen, dann lag der Schnittpunkt mit der zweiten Standlinie irgendwo auf der Seekarte, aber bestimmt nicht im Standort. So war es notwendig, den Abstand zwischen den Schätzbreiten groß genug zu wählen.
Trotz des großen Breitenabstandes wird der richtige Winkel kaum getroffen werden können, denn der wahre Standort liegt nie genau zwischen den beiden Schätzbreiten. Er wird immer mehr oder weniger näher an einer der Schätzbreiten liegen und auch dadurch entstehen Winkelfehler, so dass die Kreuzung zweier Standlinien den wahren Standort gar nicht genau treffen kann. Trotzdem war die Sumner Methode eine lange gesuchte Möglichkeit, einen Standort auf See einigermaßen genau finden zu können und sie markiert den Beginn der grafischen Navigation.