Links:
Die geometrische Lösung des Zweihöhenproblems
Carl Friedrich Gauß und die analytische Auflösung
Thomas H. Sumner der Erfinder der linearen Standlinie
Marcq Saint Hilaire bringt es zu Ende
Die Geschichte der Astronavigation ist lang und hat zahlreiche Lösungen hervorgebracht. Wissenschaftlich begann sie im 16. Jahrhundert. Ein erster Akteur war der Portugiese Pedro Nunes. Er sah in der Höhe der Sonne zu zwei verschiedenen Tageszeiten einen Zusammenhang mit dem Standort eines Schiffes und begründete damit das Zweihöhenproblem. Dieses wurde zur Grundlage sämtlicher in den folgenden Jahrhunderten entwickelten Methoden und Verfahren zur astronomischen Standortbestimmung auf See.
Doch vorerst konnte niemand einen Weg finden, wie diese Idee für die Seefahrt nutzbar gemacht werden könnte.
So setzte der spanische König im Jahr 1600 einen Preis für denjenigen aus, der eine praktisch anwendbare Lösung anbieten konnte, blieb damit aber erfolglos. Auch das Preisausschreiben der Pariser Akademie der Wissenschaften im Mai 1727 brachte keine praktikablen Lösungen herbei, obwohl sich sogar Wissenschaftler wie Daniel Bernoulli, der als Begründer der Strömungslehre bekannt ist, daran beteiligten. Die Bestimmung der Breite galt zu jener Zeit als eine der wichtigsten Aufgaben, denn ohne Kenntnis einer genauen Breite war auch eine genaue Bestimmung der Länge nicht möglich, ganz gleich, ob dies mit Monddistanzen oder mit einem Chronometer geschehen sollte.
Im Jahr 1771 hatte Chevalier de Borda eine Idee. Er sagte sich, dass diejenige Breite die wahre Standortbreite ist, wenn der in Zeit ausgedrückte berechnete Stundenwinkel zwischen zwei Sonnenständen genauso groß ist, wie die zwischen den Beobachtungen verstrichene Zeit. Die Konsequenz war, dass die zur Berechnung des Stundenwinkels benutzt Breite so oft geschätzt und korrigiert werden musste, bis die von der Schiffsuhr gemessene Zeit mit der berechneten Zeit übereinstimmte. Dann war die geschätzte Breite gleich der Standortbreite.
Eine bedeutende Initiative ging von dem berühmten Mathematiker Leonhard Euler aus, indem er die Gleichungen der sphärischen Trigonometrie, genauso wie wir sie heute kennen, in zwei Abhandlungen (SPHÄRISCHE TRIGONOMETRIE 1753 – 1779) zusammenstellte und auch die davon abgeleiteten Gleichungen für deren logarithmische Berechnung angab. Euler selbst bot außerdem eine Methode zur Berechnung der geografischen Breite auf der Grundlage zweier Höhen der Sonne an.
 Gegen Ende des 18. Jahrhunderts verdichteten sich dadurch konkrete Lösungsansätze durch Beiträge verschiedener Autoren auf ein Modell, das aus zwei Polardreiecken XPZ und X’PZ und einem zentralen Dreieck XZX’ bestand, wie es in dem nebenstehenden Bild zu sehen ist.
Gegen Ende des 18. Jahrhunderts verdichteten sich dadurch konkrete Lösungsansätze durch Beiträge verschiedener Autoren auf ein Modell, das aus zwei Polardreiecken XPZ und X’PZ und einem zentralen Dreieck XZX’ bestand, wie es in dem nebenstehenden Bild zu sehen ist.
Eine schlüssige Beschreibung dieses Modells, das bis heute allen bekannt gewordenen Navigationsmethoden zugrunde liegt, wurde im Jahr 1792 als Ergebnis einer zwei Monate langen in Gotha stattgefundenen Zusammenarbeit des Niederländers Pieter Nieuwland mit Franz Xaver von Zach, einem späteren Freund von Carl Friedrich Gauß bekannt. Sogar der zu beschreitende mathematische Lösungsweg war angegeben worden. Die Standortlänge muss bei dieser geometrischen Lösung allerdings separat als Chronometerlänge berechnet werden.
Gauß selbst transformierte dieses geometrische Dreiecksmodell 15 Jahre später in ein mathematisches Gleichungssystem, das die Unbekannten  und
und  enthielt, woraus am Ende ganz einfach Breite und Länge eines Standortes hervorgingen. Obwohl das Gleichungssystem nur transzendente Funktionen enthielt und damit allgemein als unlösbar galt, fand Gauß eine analytische Lösung. Diese bestand aus sechs hintereinander zu lösenden Gleichungen, die darüber hinaus auch gleich die Länge und damit eine vollständige Lösung des Zweihöhenproblems lieferten.
enthielt, woraus am Ende ganz einfach Breite und Länge eines Standortes hervorgingen. Obwohl das Gleichungssystem nur transzendente Funktionen enthielt und damit allgemein als unlösbar galt, fand Gauß eine analytische Lösung. Diese bestand aus sechs hintereinander zu lösenden Gleichungen, die darüber hinaus auch gleich die Länge und damit eine vollständige Lösung des Zweihöhenproblems lieferten.
Mit diesen beiden Varianten war das Zweihöhenproblem mathematisch exakt gelöst, doch die Ergebnisse waren ernüchternd. Positionsberechnungen mit den vorliegenden Formelapparaten sowohl für das Dreiecksmodell, als auch für die Gauß Methode waren nur mit Logarithmen möglich. Das hätte an Bord der immer schneller fahrenden Schiffen zu viel Zeit in Anspruch genommen, außerden bestand kein großes Vertrauen zur Anwendung reiner Mathematik an Bord. So wurde dieses Verfahren von den Seeleuten nicht akzeptiert. Insbesondere in der ersten Hälfte des 19. Jahrhunderts wurde deshalb nur mit der Methode Mittagsbreite bzw. Nordsternbreite, gefolgt von Koppelnavigation und Chronometerlänge oder unter Anwendung der Douwes Methode navigiert.
Die industrielle Revolution von 1760 bis 1840 führte zu einem Anstieg von Seemacht und Seehandel, wie es ihn bisher noch nicht gegeben hatte. Segelschiffe wurden schneller, mussten am Ende aber doch den neuen Dampfschiffen weichen. Der angewachsene Schiffsverkehr auf den Weltmeeren litt sehr darunter, dass die Möglichkeiten einer sicheren Hochseenavigation noch immer recht bescheiden waren. Dampfschiffe verbrauchten Brennstoff, der Geld kostet und wenn weniger Kohle gebunkert werden muss, dann kann mehr Nutzlast transportiert werden. Die gefahrenen Kurse wurden optimiert und sollten dann aber auch eingehalten werden, was wiederum nur möglich war, wenn die Kapitäne entsprechende Navigationsmöglichkeiten an die Hand bekämen.
Der Druck, endlich bessere Navigationsverfahren zu entwickeln, war groß. Was die Wissenschaft geliefert hatte, war zwar exakt, aber an Bord eines Schiffes nicht anwendbar. Die Lösung kam schließlich aus der Praxis. Es war der amerikanische Handelskapitän Thomas H. Sumner der im Dezember 1837 die grafische Navigationsmethode erfand. Vier Jahrzehnte später gelang dem französischen Fregattenkapitän Marcq Saint Hilaire eine entscheidende Verbesserung dieser Methode, die heute in Deutschland als Höhendifferenzverfahren bekannt ist.
Grafische M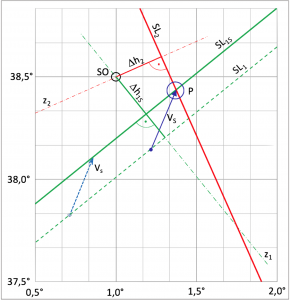 ethoden sind Näherungsnethoden, bei denen die Krümmungen der gedachten Höhengleichen im Standortbereich durch Geraden approximiert werden. Das funktioniert bei sehr großen Durchmessern der Höhengleichen gut. Der Standortbereich muss vorher jedoch geschätzt werden.
ethoden sind Näherungsnethoden, bei denen die Krümmungen der gedachten Höhengleichen im Standortbereich durch Geraden approximiert werden. Das funktioniert bei sehr großen Durchmessern der Höhengleichen gut. Der Standortbereich muss vorher jedoch geschätzt werden.
Das nebenstehende Bild zeigt dafür ein Beispiel. Der natürliche Bezugspunkt, der Bildpunkt der Sonne, liegt zu weit weg und wird durch einen naheliegenden Schätzort SO ersetzt. Dadurch wird für die folgenden Konstruktionen ein übersichtlicher Maßstab möglich. Alle Linien werden mit Bleistift und Lineal direkt in die Seekarte, oder wie hier gezeigt, in eine sog. Leerkarte eingezeichnet. Standlinien SL stehen immer senkrecht zum Azimutstrahl z, der für die jeweiligen Beobachtungszeiten und den Schätzort berechnet wird. Sie schneiden diesen in einem Abstand vom Schätzort, der gleich der Differenz aus der vom Schiff aus beobachteten Höhe und der für den Schätzort berechneten Höhe ist. Für die erste Beobachtung ist das die Höhendifferenz Δh1s und für die zweite Beobachtung Δh2. Das Vorzeichen der Höhendifferenz gibt die Richtung an, entweder hin zum Bildpunkt oder weiter weg davon. Höhendifferenzen in Bogenminuten sind in diesem Falle zahlengleich mit Seemeilen.
Eine Ortsveränderung zwischen den Beobachtungen, hier als blauer Versegelungsvektor dargestellt, wird durch Parallelverschiebung der Standlinie SL1 aus der ersten Beobachtung auf die Spitze des zunächst an beliebiger Stelle angesetzten Versegelungsvektors behandelt. Die Kreuzung der versegelten grünen Standlinie SL1s mit der roten Standlinie SL2 aus der zweiten Beobachtung ist der Schiffsort.
Die Verbreitung der grafischen Methoden, dazu zählen auch die Tafelmethoden, gilt als Wendepunkt in der Hochseenavigation und als Beginn der Ära der sogenannten modernen Astronavigation, die erst mit der Einführung der Satellitennavigation ein Ende fand. Heutzutage wird die astronomische Navigation noch in Notfällen eingesetzt und dann vorwiegend als Computer-App. Als einzige Backup-Methode besitzt sie den Vorteil, unabhängig von Satellitensignalen zu funktionieren. Grafische Verfahren sind zur Digitalisierung wenig geeignet.